
I metodi di intersezione sono usati principalmente per l’orientamento o il “riattacco” di poligonali; il loro impiego infatti non è usato per la determinazione di punti di inquadramento di reti in zone a larga scala ma più che altro per appoggiare o rinfittire il posizionamento di punti fondamentali in zone a piccola scala.
Si dividono principalmente in:

Ciò che distingue le intersezioni dirette da quelle inverse è rappresentato dalla natura dei punti di stazione e dei punti collimati.
Nelle intersezioni dirette infatti viene fatta stazione nei punti di coordinate note e collimato il/i punto/i di coordinate incognite.
Nelle intersezioni inverse invece, così come propone il nome, verrà fatta stazione nel punto di coordinate incognite e inversamente ne verrà determinata la posizione collimando punti di coordinate note.
Appare evidente che siano di maggior comodità i metodi in avanti, poiché le coordinate del punto incognito potrebbero essere calcolate direttamente con semplici regole trigonometriche partendo dalla conoscenza degli angoli e quindi degli azimut.
In realtà, se facciamo mente locale alle caratteristiche dei punti noti, questo appare non più così scontato.
Se pensiamo infatti che tali punti fanno parte di reti di triangolazioni e che sono spesso mire o segnali la cui posizione deve essere garantita stabile e duratura nel tempo, la loro stazionabilità è in dubbio.
Posizionare lo strumento nello spigolo di un fabbricato o in cima ad un campanile non è possibile.
Per tale ragione, sebbene la risoluzione dei metodi inversi sia più complessa dal punto di vista del calcolo, il loro uso è senz’altro più comune.
Il metodo dell’INTERSEZIONE INVERSA elaborato da Willebrord Snellius e Laurent Pothenot consiste proprio nel calcolo delle coordinate del punto di stazione – ad esempio per la partenza di una poligonale o per il raffittimento di una rete – collimando 3 punti di coordinate note e misurandone solo 3 letture angolari.
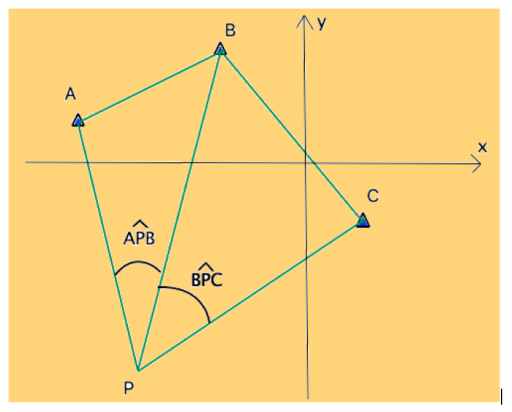
La risoluzione grafica, elaborata da Jacques Cassini, prevede la costruzione di due circonferenze particolari appartenenti rispettivamente agli assi dei lati AB e BC e quindi intersecanti nel punto B – necessariamente per la definizione di asse – e in un punto P la cui posizione varia in base agli angoli APB e BPC.
La risoluzione grafica permette un rapido svolgimento del problema e l’identificazione di una posizione univoca del punto di coordinate incognite.
Se svolta con accuratezza e mediante programmi CAD, consente di sostituire totalmente la trattazione analitica. Qui di seguito vediamo come si procede:
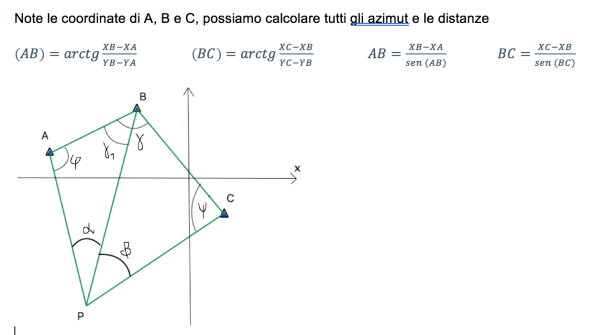
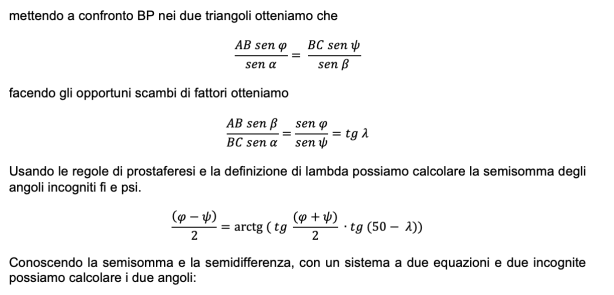
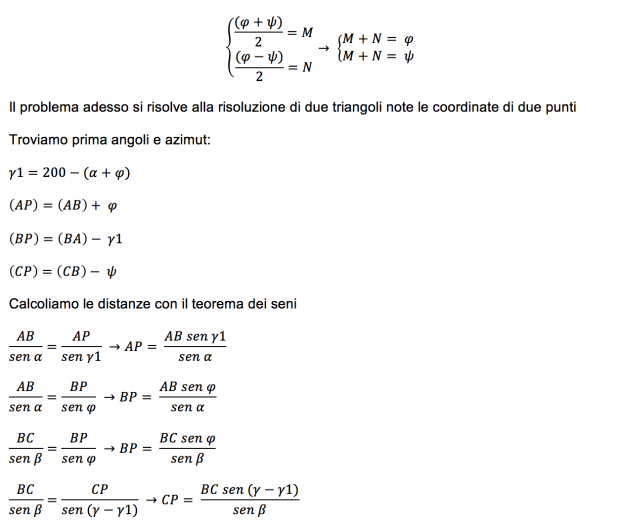
PASSIAMO ALLA RISOLUZIONE ANALITICA



Salve, ma se conoscessimo solo le coordinate di A e B, angolo interno compreso e distanze A e B comprese, possiamo riuscire a trovare le coordinate di P???
"Mi piace""Mi piace"
Certo. Se conosci le distanze PA e PB le coordinate di P si possono trovare semplicemente risolvendo il triangolo ABP. Puoi trovare l’angolo in A (BAP) con il teorema dei seni, e poi l’azimut (AP)=(AB)+BAP per somma dell’azimut (AB) ottenuto con le coordinate e l’angolo sopra trovato con il teorema dei seni. A questo punto le coordinate di P sono date dalle coordinate di A più distanza AP x sen (o cos) dell’azimut (AP). A voler essere pignoli, dovresti ripetere il procedimento da B, trovare le coordinate di P da B e fare la media.
"Mi piace""Mi piace"
Bellissimo sito…
"Mi piace""Mi piace"